Effect of the Hybrid Assistive Limb on the Gait Pattern for Cerebral Palsy

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. HAL Protocol
2.3. Outcome Measures
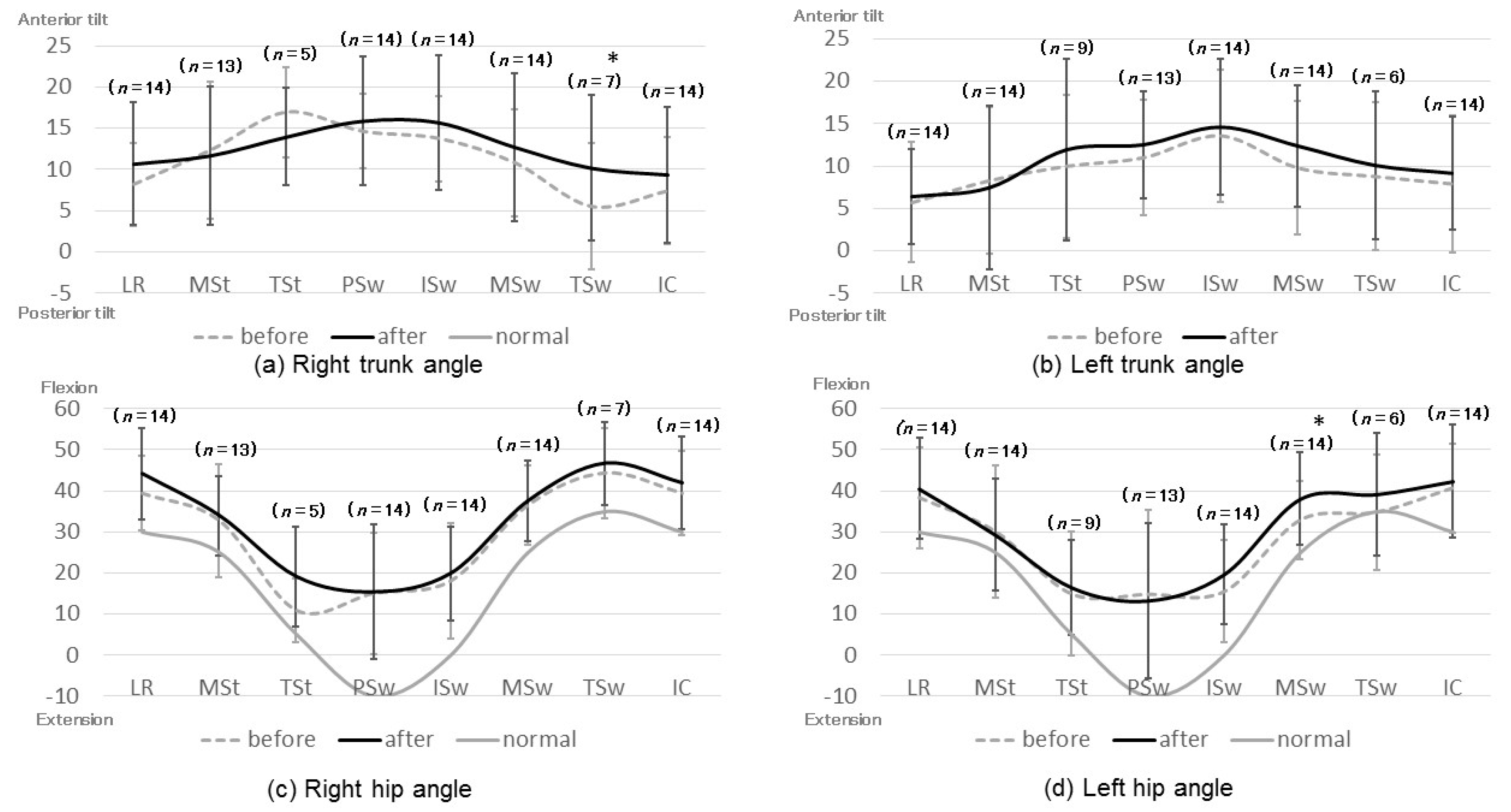
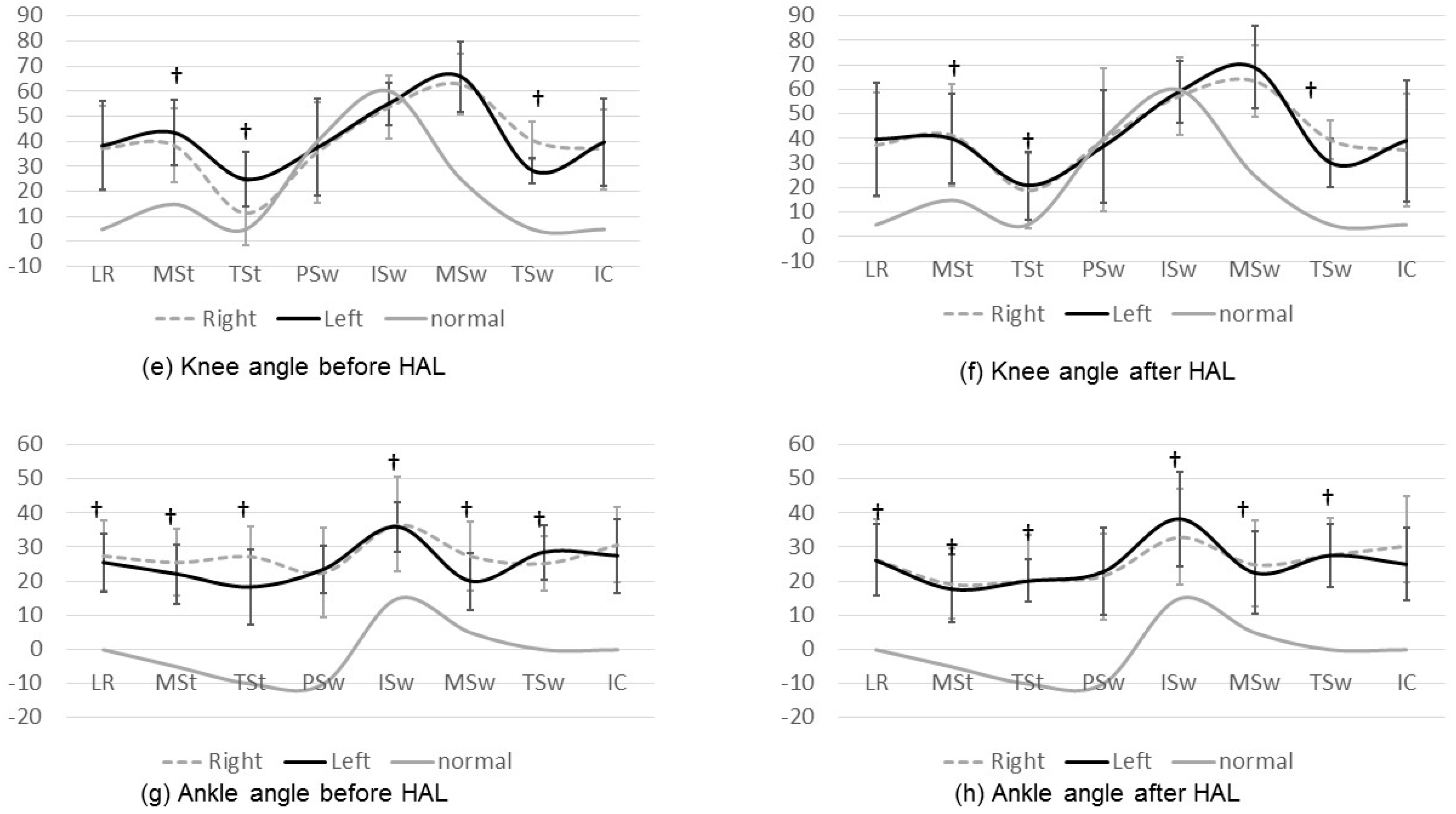
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bax, M.; Goldstein, M.; Rosenbaum, P.; Leviton, A.; Paneth, N.; Dan, B.; Jacobsson, B.; Damiano, D. Executive committee for the definition of cerebral palsy. Proposed definition and classification of cerebral palsy. Dev. Med. Child Neurol. 2005, 47, 571–576. [Google Scholar] [CrossRef] [PubMed]
- Blair, E. Epidemiology of the cerebral palsies. Orthop. Clin. N. Am. 2010, 41, 441–455. [Google Scholar] [CrossRef] [PubMed]
- Eisenberg, S.; Zuk, L.; Carmeli, E.; Katz-Leurer, M. Contribution of stepping while standing to function and secondary conditions among children with cerebral palsy. Pediatr. Phys. 2009, 21, 79–85. [Google Scholar] [CrossRef] [PubMed]
- Chan, N.N.C.; Smith, A.W.; Lo, S.K. Efficacy of neuromuscular electrical stimulation in improving ankle kinetics during walking in children with cerebral palsy. Hong Kong Physiother. J. 2004, 22, 50–56. [Google Scholar] [CrossRef] [Green Version]
- Dodd, K.J.; Foley, S. Partial body-weight-supported treadmill training can improve walking in children with cerebral palsy: A controlled clinical trial. Dev. Med. Child Neurol. 2007, 49, 101–105. [Google Scholar] [CrossRef]
- Borggraefe, I.; Kiwull, L.; Schaefer, J.S.; Koerte, I.; Blaschek, A.; Meyer-Heim, A.; Heinen, F. Sustainability of motor performance after robotic-assisted treadmill therapy in children: An open, non-randomized baseline-treatment study. Eur. J. Phys. Rehabil. Med. 2010, 46, 125–131. [Google Scholar]
- Meyer-Heim, A.; Ammann-Reiffer, C.; Schmartz, A.; Schäfer, J.; Sennhauser, F.H.; Heinen, F.; Knecht, B.; Dabrowski, E.; Borggraefe, I. Improvement of walking abilities after robotic-assisted locomotion training in children with cerebral palsy. Arch. Dis. Child 2009, 94, 615–620. [Google Scholar] [CrossRef] [Green Version]
- Drużbicki, M.; Rusek, W.; Snela, S.; Dudek, J.; Szczepanik, M.; Zak, E.; Durmala, J.; Czernuszenko, A.; Bonikowski, M.; Sobota, G. Functional effects of robotic-assisted locomotor treadmill therapy in children with cerebral palsy. J. Rehabil. Med. 2013, 45, 358–363. [Google Scholar] [CrossRef] [Green Version]
- Wiart, L.; Rosychuk, R.J.; Wright, F.V. Evaluation of the effectiveness of robotic gait training and gait-focused physical therapy programs for children and youth with cerebral palsy: A mixed methods RCT. BMC Neurol. 2016, 16, 86. [Google Scholar] [CrossRef] [Green Version]
- Lefmann, S.; Russo, R.; Hillier, S. The effectiveness of robotic-assisted gait training for paediatric gait disorders: Systematic review. J. Neuroeng. Rehabil. 2017, 14, 1. [Google Scholar] [CrossRef] [Green Version]
- Schroeder, A.S.; Von Kries, R.; Riedel, C.; Homburg, M.; Auffermann, H.; Blaschek, A.; Jahnm, K.; Heinen, F.; Borggraefe, I.; Berweck, S. Patient-specific determinants of responsiveness to robot-enhanced treadmill therapy in children and adolescents with cerebral palsy. Dev. Med. Child Neurol. 2014, 56, 1172–1179. [Google Scholar] [CrossRef] [PubMed]
- Swinnen, E.; Duerinck, S.; Baeyens, J.P.; Meeusen, R.; Kerckhofs, E. Effectiveness of robot-assisted gait training in persons with spinal cord injury: A systematic review. J. Rehabil. Med. 2010, 42, 520–526. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smania, N.; Bonetti, P.; Gandolfi, M.; Cosentino, A.; Waldner, A.; Hesse, S.; Werner, C.; Bisoffi, G.; Geroin, C.; Munari, D. Improved gait after repetitive locomotor training in children with cerebral palsy. Am. J. Phys. Med. Rehabil. 2011, 90, 137–149. [Google Scholar] [CrossRef] [PubMed]
- Dayan, E.; Cohen, L.G. Neuroplasticity subserving motor skill learning. Neuron 2011, 72, 443–454. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, K.; Mito, G.; Kawamoto, H.; Hasegawa, Y.; Sankai, Y. Intention-based walking support for paraplegia patients with Robot Suit HAL. Adv. Robot. 2007, 21, 1441–1469. [Google Scholar] [CrossRef] [Green Version]
- Fukuda, H.; Samura, K.; Hamada, O.; Saita, K.; Ogata, T.; Shiota, E.; Sankai, Y.; Inoue, T. Effectiveness of acute phase hybrid assistive limb rehabilitation in stroke patients classified by paralysis severity. Neurol. Med. Chir. 2015, 55, 487–492. [Google Scholar] [CrossRef] [Green Version]
- Chihara, H.; Takagi, Y.; Nishino, K.; Yoshida, K.; Arakawa, Y.; Kikuchi, T.; Takenubu, Y.; Miyamoto, S. Factors predicting the effects of hybrid assistive limb robot suit during the acute phase of central nervous system injury. Neurol. Med. Chir. 2016, 56, 33–37. [Google Scholar] [CrossRef] [Green Version]
- Mizukami, M.; Yoshikawa, K.; Kawamoto, H.; Sano, A.; Koseki, K.; Asakwa, Y.; Iwamoto, K.; Nagata, H.; Tsurushima, H.; Nakai, K.; et al. Gait training of subacute stroke patients using a hybrid assistive limb: A pilot study. Disabil. Rehabil. Assist. Technol. 2017, 12, 197–204. [Google Scholar] [CrossRef]
- Kawamoto, H.; Kamibayashi, K.; Nakata, Y.; Yamawaki, K.; Ariyasu, R.; Sankai, Y.; Sakane, M.; Eguchi, K.; Ochiai, N. Pilot study of locomotion improvement using hybrid assistive limb in chronic stroke patients. BMC Neurol. 2013, 13, 141. [Google Scholar] [CrossRef] [Green Version]
- Kubota, S.; Nakata, Y.; Eguchi, K.; Kawamoto, H.; Kamibayashi, K.; Sakane, M.; Sankai, Y.; Ochiai, N. Feasibility of rehabilitation training with a newly developed wearable robot for patients with limited mobility. Arch. Phys. Med. Rehabil. 2013, 94, 1080–1087. [Google Scholar] [CrossRef] [Green Version]
- Sczesny-Kaiser, M.; Höffken, O.; Aach, M.; Cruciger, O.; Grasmücke, D.; Meindl, R.; Schildhauer, T.A.; Schwenkreis, P.; Tegenthoff, M. HAL® exoskeleton training improves walking parameters and normalizes cortical excitability in primary somatosensory cortex in spinal cord injury patients. J. Neuroeng. Rehabil. 2015, 12, 68. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taketomi, T.; Sankai, Y. Walking assistance for cerebral palsy with robot suit HAL. Trans. Jpn. Soc. Med. Biol. Eng. 2012, 50, 105–110. [Google Scholar]
- Taketomi, T.; Sankai, Y. Stair ascent assistance for cerebral palsy with robot suit HAL. In Proceedings of the 2012 IEEE/SICE International Symposium on System Integration (SII), Fukuoka, Japan, 16–18 December 2012; pp. 331–336. [Google Scholar]
- Takahashi, K.; Mutsuzaki, H.; Mataki, Y.; Yoshikawa, K.; Matsuda, M.; Enomoto, K.; Sano, K.; Kubota, A.; Mizukami, M.; Iwasaki, N.; et al. Safety and immediate effect of gait training using a Hybrid Assistive Limb in patients with cerebral palsy. J. Phys. Sci. 2018, 30, 1009–1013. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Matsuda, M.; Mataki, Y.; Mutsuzaki, H.; Yoshikawa, K.; Takahashi, K.; Enomoto, K.; Sano, K.; Mizukami, M.; Tomita, K.; Ohguro, H.; et al. Immediate effects of a single session of robot-assisted gait training using Hybrid Assistive Limb (HAL) for cerebral palsy. J. Phys. Sci. 2018, 30, 207–212. [Google Scholar] [CrossRef] [Green Version]
- Nakagawa, S.; Mutsuzaki, H.; Mataki, Y.; Endo, Y.; Kamada, H.; Yamazaki, M. Improvement and sustainability of walking ability with hybrid assistive limb training in a patient with cerebral palsy after puberty: A case report. J. Phys. Sci. 2019, 31, 633–637. [Google Scholar] [CrossRef]
- Nakagawa, S.; Mutsuzaki, H.; Mataki, Y.; Endo, Y.; Matsuda, M.; Yoshikawa, K.; Kamada, H.; Iwasaki, N.; Yamazaki, M. Safety and immediate effects of Hybrid Assistive Limb in children with cerebral palsy: A pilot study. Brain Dev. 2020, 42, 140–147. [Google Scholar] [CrossRef]
- Endo, Y.; Mutsuzaki, H.; Mizukami, M.; Yoshikawa, K.; Kobayashi, Y.; Yozu, A.; Mataki, Y.; Nakagawa, S.; Iwasaki, N.; Yamazaki, M. Long-term sustained effect of gait training using a hybrid assistive limb on gait stability via prevention of knee collapse in a patient with cerebral palsy: A case report. J. Phys. Sci. 2018, 30, 1206–1210. [Google Scholar] [CrossRef]
- Borel, S.; Schneider, P.; Newman, C.J. Video analysis software increases the interrater reliability of video gait assessments in children with cerebral palsy. Gait Posture 2011, 33, 727–729. [Google Scholar] [CrossRef]
- Mataki, Y.; Kamada, H.; Mutsuzaki, H.; Shimizu, Y.; Takeuchi, R.; Mizukami, M.; Yoshikawa, K.; Takahashi, K.; Matsuda, M.; Iwasaki, N.; et al. Use of Hybrid Assistive Limb (HAL®) for a postoperative patient with cerebral palsy: A case report. BMC Res. Notes 2018, 11, 201. [Google Scholar] [CrossRef] [Green Version]
- Matsuda, M.; Iwasaki, N.; Mataki, Y.; Mutsuzaki, H.; Yoshikawa, K.; Takahashi, K.; Enomoto, K.; Sano, K.; Kubota, A.; Nakayama, T.; et al. Robot-assisted training using Hybrid Assistive Limb® for cerebral palsy. Brain Dev. 2018, 40, 642–648. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Sex | Age (Years) | Height (cm) | Weight (kg) | Paralysis | GMFCS | Assistive Device | Orthosis | 10MWT | Gait Evaluation |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | F | 19 | 152 | 40 | Diplegia | II | NA | NA | + | + |
| 2 | M | 12 | 138 | 27 | Diplegia | III | Walker | AFO | + | + |
| 3 | M | 16 | 153 | 49 | Diplegia | III | Walker | AFO | + | + |
| 4 | F | 11 | 137 | 35 | Diplegia | III | Walker | AFO | + | + |
| 5 | M | 20 | 168 | 64 | Diplegia | III | Parallel bars | AFO | - | + |
| 6 | F | 15 | 141 | 48 | Diplegia | III | Walker | AFO | + | + |
| 7 | M | 15 | 158 | 43 | Diplegia | III | Walker | AFO | + | + |
| 8 | F | 15 | 143 | 35 | Diplegia | II | Crutch | AFO | + | + |
| 9 | M | 14 | 153 | 37 | Diplegia | IV | BS walker | AFO | - | - |
| 10 | M | 11 | 132 | 32 | R hemiplegia | I | NA | R AFO | + | + |
| 11 | M | 9 | 134 | 28 | R hemiplegia | I | NA | R AFO | + | + |
| 12 | M | 10 | 134 | 36 | Diplegia | III | NA | AFO | + | + |
| 13 | F | 12 | 153 | 24 | Quadriplegia | IV | BS walker | AFO | - | - |
| 14 | M | 23 | 165 | 45 | Diplegia | III | Crutch | AFO | + | + |
| 15 | M | 16 | 152 | 35 | Diplegia | IV | - | AFO | - | - |
| 16 | M | 13 | 150 | 36 | R hemiplegia | I | NA | NA | + | + |
| 17 | M | 10 | 146 | 38 | Diplegia | IV | Parallel bars | AFO | - | - |
| 18 | F | 22 | 155 | 41 | Quadriplegia | III | Crutch | AFO | + | + |
| 19 | M | 29 | 165 | 45 | Quadriplegia | IV | - | AFO | - | - |
| Outcome Measurements | Before Using the HAL | After Using the HAL | p-Value | n |
|---|---|---|---|---|
| Speed (m/s) | 0.78 ± 0.35 | 0.93 ± 0.43 | 0.003 * | 13 |
| Cadence (steps/min) | 101.6 ± 31.1 | 108.6 ± 42.4 | 0.223 | 13 |
| Right stride length (m) | 0.92 ± 0.27 | 1.02 ± 0.28 | 0.020 * | 14 |
| Left stride length (m) | 0.93 ± 0.27 | 1.05 ± 0.28 | 0.014 * | 14 |
| Right/left stride length | 0.99 ± 0.14 | 0.98 ± 0.09 | 0.411 | 14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mataki, Y.; Mutsuzaki, H.; Kamada, H.; Takeuchi, R.; Nakagawa, S.; Yoshikawa, K.; Takahashi, K.; Kuroda, M.; Iwasaki, N.; Yamazaki, M. Effect of the Hybrid Assistive Limb on the Gait Pattern for Cerebral Palsy. Medicina 2020, 56, 673. https://doi.org/10.3390/medicina56120673
Mataki Y, Mutsuzaki H, Kamada H, Takeuchi R, Nakagawa S, Yoshikawa K, Takahashi K, Kuroda M, Iwasaki N, Yamazaki M. Effect of the Hybrid Assistive Limb on the Gait Pattern for Cerebral Palsy. Medicina. 2020; 56(12):673. https://doi.org/10.3390/medicina56120673
Chicago/Turabian StyleMataki, Yuki, Hirotaka Mutsuzaki, Hiroshi Kamada, Ryoko Takeuchi, Shogo Nakagawa, Kenichi Yoshikawa, Kazushi Takahashi, Mayumi Kuroda, Nobuaki Iwasaki, and Masashi Yamazaki. 2020. "Effect of the Hybrid Assistive Limb on the Gait Pattern for Cerebral Palsy" Medicina 56, no. 12: 673. https://doi.org/10.3390/medicina56120673