|
|
|
|
2014.11.27
カテゴリ:話題のFUTURE
 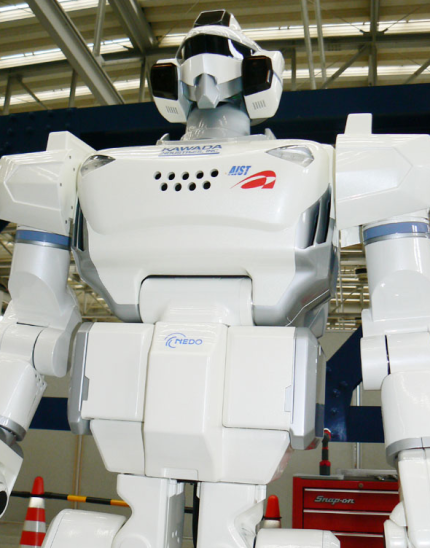         「HRP-3」は経済産業省の技術開発プロジェクト「人間協調・共存型ロボットシステム(Humanoid Robotics Project、HRP)」のあとを受け、NEDO技術開発機構による「基盤技術研究促進事業(基盤促)」の一環として開発された次世代ヒューマノイドロボット。人間型ロボットが実際の環境で働くために必要な基盤技術の開発を行なうためのロボットだ。 「HRP-3」の基本スペックは、身長160cm、体重68kg(バッテリ含む)。関節自由度は42(首2、腰2、腕7×2、脚6×2、ハンド6×2)。手首部分に1自由度、そして5自由度のハンドと合計6自由度が追加され、HRP-2に比べて12自由度増えた。これにより、複雑な手先作業に対応することが可能になった。ハンドの指は3本で、電動ドリルを把持操作が可能となった。 ・大きな特徴は雨天の屋外での運用を視野に入れていることで、関節軸部や伝送実装部分には1時間あたり100mmの非常に強い雨にも耐えられる防塵・防滴機能を備えている。同時に、ロボットからの廃熱を促す機構を装備している。また、滑らかな歩容生成と滑り検出技術とそのフィードバックによって、非常に滑りやすい氷上を車で走行するときとほぼ同じ状況に相当する摩擦係数0.1程度の路面での歩行も可能な制御技術を持っている。 ・歩行時の制御技術であるZMP概念を支持面が同一平面にない場合にも拡張した「一般化ZMP」手法により、両足だけではなく腕も添えて体重を支えつつ、もう片方の腕で作業を行なうことも可能だ。ロボット全体の動力学的なバランスを保つ「脚腕協調制御技術」によって、腕と足を併用した作業も行なえる。これらの技術を組み合わせることによって、HRP-3は、ロボットの立ち位置から離れた場所にある物体も、腕で体重を支えて操作できる。 ・ロボットは「脚腕協調制御技術」によって全身のバランスを自律でとりながら、操縦者の命令に従って動く。たとえば、物体を取るときは、手先の目標だけ指示すれば、腕や足の各関節の動きはロボットが自動的に生成して適切な姿勢を取る。 by イソゴーランド Hot News お気に入りの記事を「いいね!」で応援しよう
Last updated
2014.11.27 13:08:44
コメント(0) | コメントを書く
[話題のFUTURE] カテゴリの最新記事
|